Driving Pi
Introduction
This app does autonomous LEGO car driving by classifying road segmentation and object detection for traffic light using Intel Movidius Neural Compute Stick 2.
Prerequisites
The app requires the following hardware:
- 1 x Raspberry Pi 3B+*
- 1 x Intel ® Neural Compute Stick 2 (NCS 2)
- 1 x BrickPi 3 - DEXTER
- 1 x Web camera (USB) OR CameraPi
- LEGO MINDSTORMS EV3 KIT
- BrickStuff (for traffic light)
- LEGO Roads set
## Setup First, setup the Raspberry Pi3 and the BrickPi3: Get started
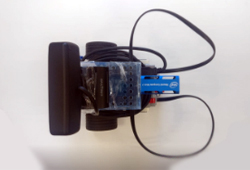
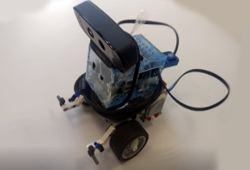
After installing the boards, start building the LEGO car using LEGO MINDSTORMS EV3 KIT: step-by-step
Instead of using the LEGO Mindstorm Controller, attach the Pi+BrickPi to the car.
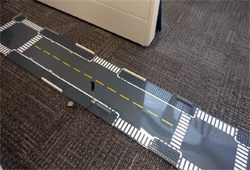
Build your LEGO road, and setup the traffic light on it.
__ 
__
How to run the sample
To run the sample, change directory to the birds application folder and use the command:
make run
Alternatively, run the Python script directly for more options:
python3 driving_pi.py -h
 ___
Makefile
Provided Makefile has various targets that help with the above mentioned tasks.
make run
Runs the sample application.
make help
Shows available targets.
make all
Builds and/or gathers all the required files needed to run the application.
make data
Gathers all of the required data need to run the sample.
make deps
Builds all of the dependencies needed to run the sample.
make install-reqs
Checks required packages that aren’t installed as part of the OpenVINO installation.
make uninstall-reqs
Uninstalls requirements that were installed by the sample program.
make clean
Removes all the temporary files that are created by the Makefile.